CS280 "Computer Vision"
Homework 2, Due March-21-2002.
Siddharth Jain , Cheng Chang ,
Almudena Konrad
( morpheus@eecs.berkeley.edu
, cchang@eecs.berkeley.edu
, almudena@cs.berkeley.edu
)
Seven Problems
Chapter 8
8.1. Show that forming unweighted local averages - which
yields an operation of the form of Equation 8.1_1- is a convolution. What
is the kernel of this convolution?
(Equation 8.1_1)
Solution:
Let H be the Kernel with m rows and n columns, F is the input
image with M rows and N columns, and R is the output image with M-m+1 rows
and N-n+1 columns. Then we can write R as the convolution of F and H:
where i goes from 1 to M-m+1 and j goes from 1 to N-n+1.
If we assume that H is a square matrix (i.e. n=m) and all
the values are ones, then we can write the convolution as:
where C0=(m-1)/2 for m odd, and C0=m/2
for m even.
Next, we let 1-C0=-k and m-C0=k, so
the convolution becomes:
which is Equation 8.1_1, multiplied by  .
.
The kernel H is a matrix (2k+1) x (2k+1) with all entries
being one multiplied by the constant
.
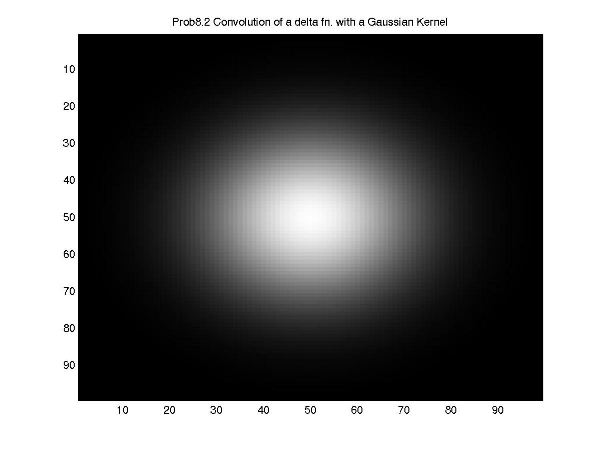
8.2. Write E0 for an image that consists of all zeros, with
a single one at the center. Show that convolving this image with the kernel:

(which is a discretized Gaussian) yields a circularly symmetric fuzzy
blob.
Solution:
8.4. Show that convolving a function with a  function simply reproduces the original function. Next show that convolving
a function with a shifted
function shifts the function.
function simply reproduces the original function. Next show that convolving
a function with a shifted
function shifts the function.
Solution:
Let R(x,y) be the result of convolving F(x,y) with H(x,y).
If H(x,y) is a delta function meaning H(u,v)=0 everywhere
except H(0,0)=1 then,
Convolving with a delta function simply reproduces the
original function.
Next consider a shifted delta function H(x,y)=0 everywhere
except at H(xs,ys)=1. Then,
Therefore, convolving with the shifted delta function shifts
the function.
8.6. Aliasing takes high spatial frequencies to low
spatial frequencies. Explain why following effects occur:
(a) In old cowboy films that show wagons moving, the
wheel often seems to be stationary or moving in the wrong direction (i.e.
the wagon moves from left to right and the wheel seems to be turning anticlockwise).
(b) White shirts with thin dark pinstripes often generate
a shimmering array of colours on television.
Solution:
All these phenomena are examples of aliasing. If we are sampling
a signal and it is varying rapidly, then we have to sample fast enough to
avoid losing any information.
(a) Let t1 be the time when first snapshot was taken,
and t2 the time when the second snapshot was taken. If t2
-t1 is equal to T which is the time taken by the wheel to make
a rotation, then the wheel will appear stationary.
If t2-t1 is slightly less than T then the wheel would
appear to rotate in the opposite direction.
(b) Thin dark stripes in a dark background mean a rapidly
varying signal whose resolution is of the order of the rgb resolution of
pixels on the screen. Since the resolution of the image we want to depict
is finer than the resolution of pixels available to us on the monitor this
effect occurs.
Chapter 9
9.1. Each pixel value in 500 x 500 pixel image I is an
independent normally distributed random variable with zero mean and standard
deviation one. Estimate the number of pixels that where the absolute value
of the x derivative, estimated by forward differences (i.e.  ) is greater than 3.
) is greater than 3.
Solution:
Let X be the random variable representing the number of pixels
with x derivative greater than 3. If each pixel has a forward difference,
then the number of pixels (Np) in the image I equals the number
of x derivatives. We need to calculate expected value of X (e.i., E(X)).
Let Di,j=Ii,j - Ii+1,j
, then Di,j is standard normal with mean zero and variance 2.
Let Yi,j, be the indicator function, where Yi,j is 1
if the absolute value of Di,j is greater than 3, and Yi,j
is 0 otherwise. Then,
To calculate  , we look at the standard normal table. However, Di,j is not normal
so we perform a change of variable. Let Mi,j=(Di,j -mean)/(st.
dev)= (Di,j-0)/sqrt(2). Then,
, we look at the standard normal table. However, Di,j is not normal
so we perform a change of variable. Let Mi,j=(Di,j -mean)/(st.
dev)= (Di,j-0)/sqrt(2). Then,  is equal to calculating
, but Mi,j is normal distributed. We obtain:
is equal to calculating
, but Mi,j is normal distributed. We obtain:
Chapter 10
10.1. Show that a circle appears as an ellipse in an
orthographic view, and that the minor axis of this ellipse is the tilt direction.
What is the aspect ratio of this ellipse?
Solution:
Let P be the texture plane and I the image plane. The circle
is in the plane P.
If I is parallel to P, then the projection is a circle.
But, if I is not parallel to P, then the two planes intersect at a line l
(see Figure 10.1). We assume l is th x-axis of both, I and P, and the angle
between y and y' is  .
.
(Figure 10.1)
The equation of the circle on P is  . In Figure 10.1 y' is projected to
. In Figure 10.1 y' is projected to  , so when
, so when  (i.e.,
(i.e.,  ),
),  . Re-writing the circle equation and replacing the y' value, we obtain
. Re-writing the circle equation and replacing the y' value, we obtain  which is the equation of the ellipse.
which is the equation of the ellipse.
Since  , the tilt direction (from y to y') corresponds to the minor axis. The aspect
radio is
, the tilt direction (from y to y') corresponds to the minor axis. The aspect
radio is  .
.
10.2. We will study measuring the orientation of a plane
in an orthographic view, given the texture consists of points laid down by
a homogenous Poisson point process. Recall that one way to generate points
according to such a process is to sample the x and y coordinate of the point
uniformly and at random. We assume that the points from our process lie within
a unit square.
(a) Show that the probability that a point will land
in a particular set is proportional to the area of that set.
(b) Assume we partition the area into disjoint sets.
Show that the number of points in each set has a multinomial probability distribution.
We will now use these observations to recover the orientation
of the plane. We partition the image texture into a collection of disjoints
sets.
(c) Show that the area of each set, backprojected onto
the textured plane, is a function of the orientation of the plane.
(d) Use this function to suggest a method for obtaining
the plane's orientation.
Solution:
(a) Let S be the set such that,

The probability that a point lands in S is,
Since x and y are chosen independently, the prob. can be
written as product of two terms. x and y are chosen uniformly, meaning f(x)
and g(y) are simply constants (say 1) so that,
Therefore, the probability that a point will land in a
particular set S is proportional to the area of the set A(S).
(b) Let S be partition into disjoint sets: {S1
, ...,Sp}, then
where N(Si) denotes the number of points in
Si.
This probability is proportioanal to,
where Ai denotes the area of the sub-set S
i and n=n1+...+np.
This is the multinomial probability distribution. The factor  , arises because of all the different ways (combinations) in which we can
divide n points so that n1 is in S1, n2
is in S2, and so on.
, arises because of all the different ways (combinations) in which we can
divide n points so that n1 is in S1, n2
is in S2, and so on.
(c) Let P be an arbitrary plane whose orientation we want
to find. The image plane I is z = 0. We can form P in the following way: start
with the plane z=0. Rotate the plane "-vely" about the x-axis by an amount  . This is equivalent to applying a rotation matrix
. This is equivalent to applying a rotation matrix  . Next, rotate the plane about its "local" y-axis by an amount
. Next, rotate the plane about its "local" y-axis by an amount  . This is equivalent to applying
. This is equivalent to applying  . Thus, the overall transformation is,
. Thus, the overall transformation is,  , since
, since  .
.

Thus the unit normal (0,0,1) is transformed into,

which means that the equation for this plane is  .
.
If we take any point (xprojected,yprojected
) on the image plane and use orthographic backprojection, then the backprojected
point is x = xprojected and y = yprojected, and using
the equation of the plane we obtain:

Note that in our analysis the object plane passes through
the origin, but this doesn't lead to any loss of generality.
We are now ready to find out how an area transforms when we
backproject it from the image plane to the object plane. Consider a rectangle
in the image plane :
The backprojection of vertices is:
To find backprojected area we do the following analysis:
Therefore, the backprojected area is a function of the
orientation of the plane.
(d) In an orthographic projection, Ai increases
by the same multiplicative factor by which Aj increases (A
i is the area of the set Si). To find the orientation of
the plane we experimentaly divide the image plane into random disjoint sets
Si having area Ai. We count the number of points n
i which land in each set. Then if we use orthographic (back)projection
then the probability that we obtain the observation we got is proportional
to:

which is proportional to  . Unfortunately this doesn't help in determining
and
.
. Unfortunately this doesn't help in determining
and
.
If we used some other projection (eg. perspective instead
of orthographic), then when we backproject, different areas on the image
plane get scaled by different amounts. We form:
 ,
,
where n1, ... , np are known by observation.
We choose that
and
such that they maximize the probability of the observation we got. These
values will give the orientation of the plane (which was our objective).
Three Programming Assignments
10.3. Texture synthesis: Implement the non-parametric texture
synthesis algorithm of section 10.3.2. Use your implementation to study:
(a) the effect of window size on the synthesized texture;
(b) the effect of window shape on the synthesized texture;
(c) the effect of the matching criterion on the synthesized
texture (i.e., using weighted sum of squares instead of sum of squares, etc.).
Solution:
First consider the i/p file description:
The i/p file "file.dat" is of the form:
w1.xmin w1.xmax w1.ymin w1.ymax
w2.xmin w2.xmax w2.ymin w2.ymax sigma
EPSILON CONST3
rows cols
data file
o/p filename
Example of an i/p file (e.g., bread6.dat)
-1 1 -1 1
-6 6 -6 6 2.0
0.1 0.2
225 225
bread.gray
bread6.out
The first line specifies the size of the initial seed used
to synthesize the image. In the above example we are saying, start
by putting a 3X3 seed from the template
The second line specifies the size of the window used for
comparing pixels - this parameter has to be chosen cleverly and varies from
image to image. We incorporate a Gaussian weighting in the code so that errors
due to nearby pixels in the window(w2) are emphasized more than the errors
due to distant pixels. For this the user has to i/p sigma of the Gaussian
- this also has to be chosen cleverly.
The third line represents two other parameters choosing
which is again guesswork and which are pretty critical. The first, EPSILON
is a number such that all points satisfying d <= (1+EPSILON)*dmin are saved
and then the bestmatch is randomly chosen from the pool of saved points.
Consider two points p1, p2 which give the same rms (root
mean square) distance. Further suppose for p1 the no. of terms (rms distance
= sqrt( sum_{1,N} square_of_diff / N )) N in the computation was 10 whereas
p2 also gave same distance but N was just 1. Clearly we don't want to save
p2. Therefore we have to incorporate some form of weighting to avoid p2 getting
saved (e.g., d = (rms distance)/sqrt(N) - this is roughly what we do).
Consider another case in which p1 and p2 both give d equal
to zero and again N was 10 for p1 and 1 for p2. The simple multiplicative
weighting above will not work in this case - what we can do is to replace
zero by a small number - this is the value of CONST3.
The fourth line specifies the size of image to synthesize
(rows*cols).
The fifth line specifies i/p filename to the program which
has rgb values of the pixels.
The sixth line specifies o/p filename of the file to be
generated by the program.
The algorithm is notoriously slow as it grows the image
pixel by pixel. The maximum time required to generate an o/p file of 225*225
pixels was more than 40 hrs. Because of the time constraint we were not able
to experiment extensively with the parameters EPSILON, CONST3, and w2.
(a) The effect of varying the window size is illustrated
in following figures:
"wood4.jpg"
, generated using a window of 9*9 pixels. See i/p parameters:
"wood4.dat"
"wood5.jpg"
, generated using a window of 11*11 pixels. See i/p parameters:
"wood5.dat"
"wood6.jpg"
, generated using a window of 13*13 pixels. See i/p parameters:
"wood6.dat"
The template file (file used to synthesize the image) is
"wood.gif"
.
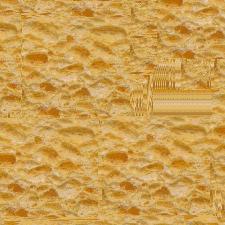
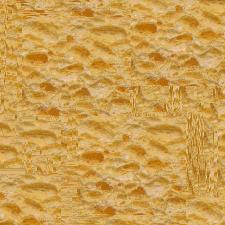
Another set of examples:
"bread4.jpg"
, generated using a window of 9*9 pixels. See i/p parameters:
"bread4.dat"
"bread5.jpg"
, generated using a window of 11*11 pixels. See i/p parameters:
"bread5.dat"
"bread6.jpg"
, generated using a window of 13*13 pixels. See i/p parameters:
"bread6.dat"
The template file is "bread.gif"
.
(b) Effect of window shape:
"bumpy2_p3.jpg"
, generated using a square window of 11*11 pixels. See i/p parameters:
"bumpy2_p3.dat"
"bumpy2rect.jpg"
, generated using a rectangular window of 13*9 pixels. See i/p parameters:
"bumpy2rect.dat"
The template file is "bumpy2.gif"
.
(c) The effect of matching criterion:
"bumpy2_p3.jpg"
, generated incorporating a Gaussian weighting (with sigma = winsize/6.4)
to emphasize errors due to nearby pixels more than the errors due to far
away pixels. See i/p parameters:"bumpy2_p3.dat"
.
"bumpy2_p1.jpg"
, generated without incorporating any Gaussian weighting. See i/p parameters:
"bumpy2_p1.dat"
.
More examples:
"D181.jpg"
(see i/p parameters: "D181.dat"
).
"D18.gif"
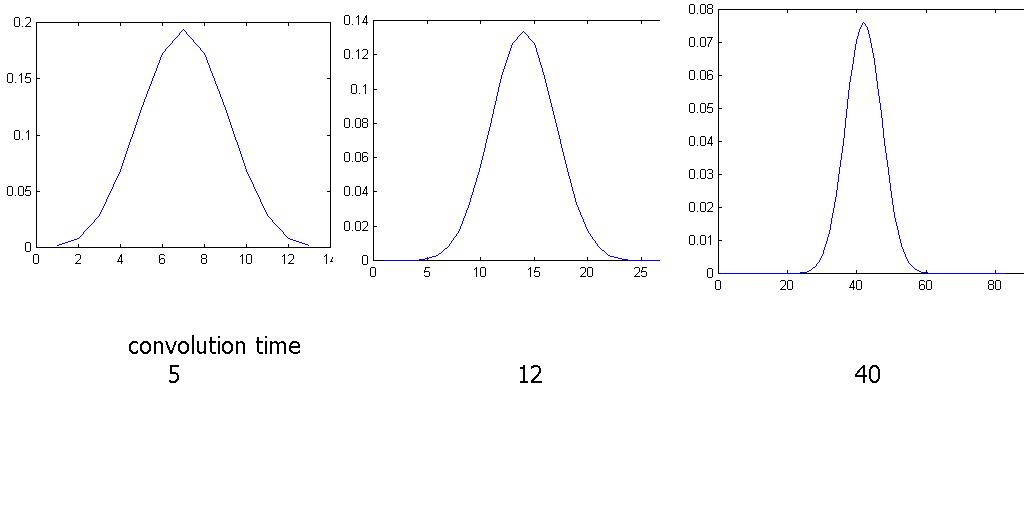
8.7. One way to obtain a Gaussian kernel is to convolve
a constant kernel with itself, many times. Compare this strategy with evaluating
a Gaussian kernel.
(a) How many repeated convolutions will you need to get
a reasonable approximation? (you will need to establish what a reasonable
approximation is; you might plot the quality of the approximation against
the number of repeated convolutions).
(b) Are there any benefits that can be obtained like this?
Solution:
(a) Figure "convolution.jpg"
, shows the convolution of the constan kernel with itself 5, 12 and 40 times.
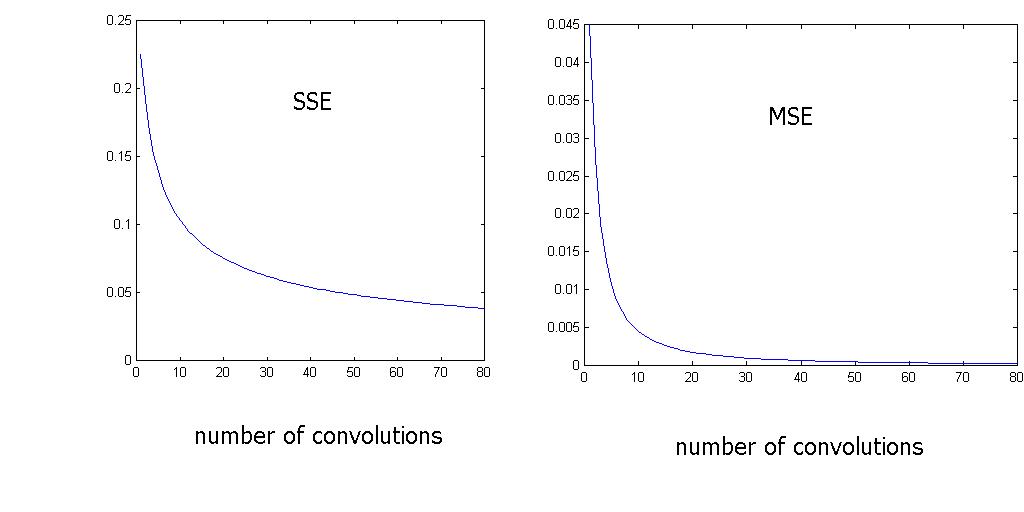
Figure "diagram.jpg"
, shows the sum of square-error(SSE) from the approximation to the evaluation
of the Gaussian function, where SSE= Sum ((approximation(i)- evaluation(i))
^2).
The evaluation gaussian function has the same mean and variance
with the approximation kernel MSE=SE/(length of the kernel).
(b) The convolution method does not need the computer to
compute exponential of a float number, it only requires the computer to do
multiplication and summation.
All the original kernel have length 3.
8.8. Write a program that produces a Gaussian pyramid
from an image.
Solution:
The Matlab files for the code are:
"gauss_f.m"
"gaussianpyramid.m"
"upsample.m"
We run the code on two images:
Zebra
image.
Arch
image.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}